Visualizing Trajectory Planning & Execution of 2R Planar Manipulator Robot using MATLAB GUI Tinker Twins 0:14 1 year ago 3 609 Скачать Далее
Trajectory Planning and Generation | Cubic Polynomials | Parabolic Blends | Robotics ThatsEngineering 21:54 3 years ago 41 348 Скачать Далее
Trajectory Generation | Robotics | Mathematical Introduction to Robotics ROBOMECHTRIX 5:40 6 years ago 31 452 Скачать Далее
How to Generate Trajectory for Robotic Manipulators in MATLAB 2021 | RST | Trapezoidal Velocity Learning Orbis 21:06 2 years ago 30 795 Скачать Далее
Global Path Planning vs Local Path Planning Energid Technologies 0:22 4 years ago 5 095 Скачать Далее
Revision, Part 1: Robot Dynamics, Trajectory planning and Robot Control Mechanical Engineering-Learn faster 25:21 4 years ago 645 Скачать Далее
Efficient Path Planning and Collision Avoidance for Robotic Arms Robotics Innovations Lab @ IISc Bangalore (RIL) 17:45 3 years ago 5 193 Скачать Далее
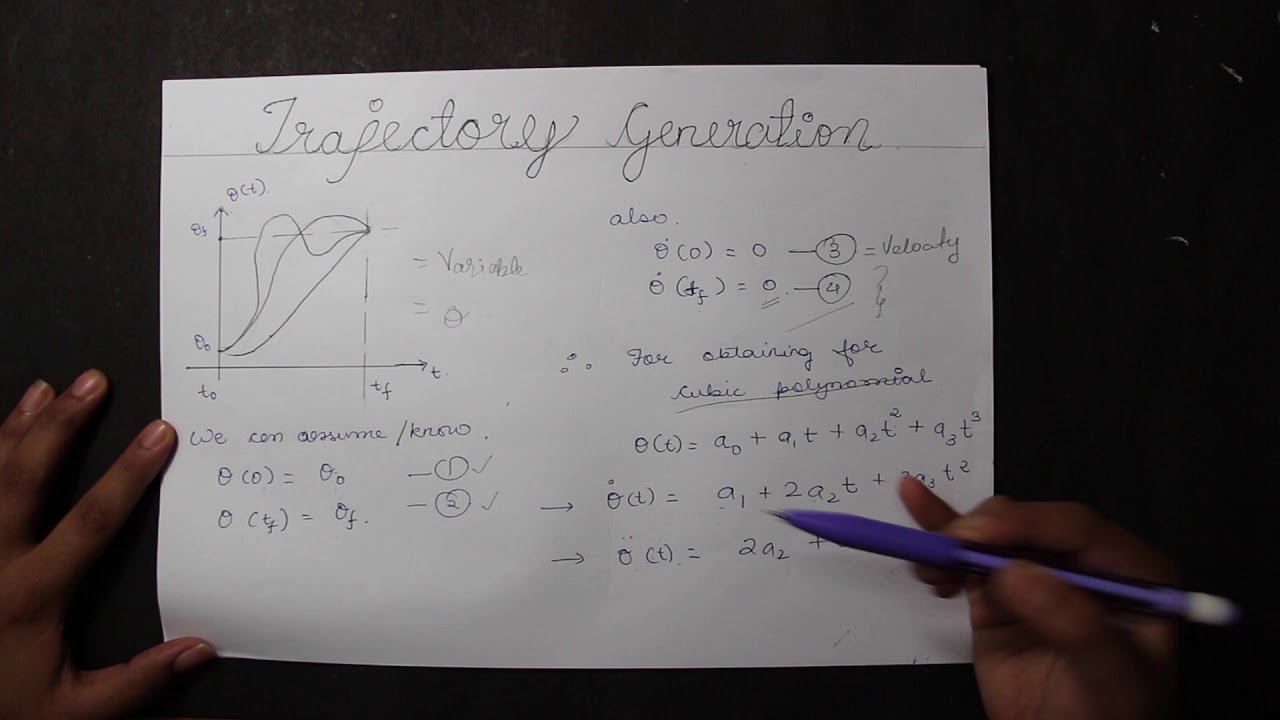
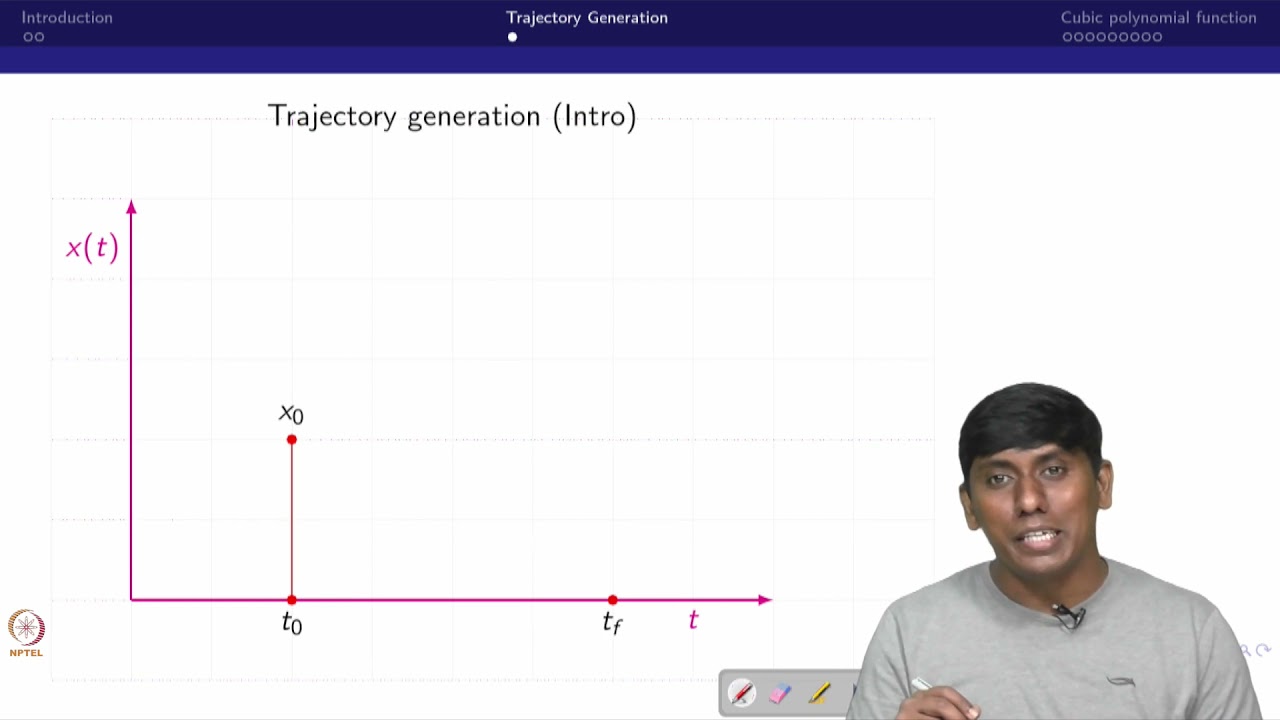
Lecture 29 - Introduction to trajectory generation NPTEL-NOC IITM 29:29 3 years ago 3 163 Скачать Далее